WAGO PLATFORM PLC OPERATION AND PROGRAMMING TRAINING
Objectives:
- Learn
the fundamentals of PLC operations.
- Learn
how to create a program for custom applications.
I. Basic PLC Fundamentals
System Components
All Programmable Logic Controllers
(PLC) consist of nearly the same components regardless of the manufacturer or
platform. Common components generally consist of:
- Processor-
The component responsible for containing and executing the program or code.
It contains the memory (volatile, non-volatile or a combination of both),
the program processor and one or more communication ports (Com Port or
Fieldbus Connection) that allow the user to connect, download and monitor a
program and allow communication to other components connected to a
network.
- Physical
I/O- Input and Output modules that allow “real world” information to be
made available to the Processor. The physical I/O can obtain and output
both discrete data such as from switches, etc. and analog or numerical
data such as from flow, pressure and temperature instruments,
potentiometers, etc. There are also specialty modules that can obtain
other types of information such as from encoders and high speed pulse
devices.
- Power
Supply- Generally, a PLC will need a 24V DC source to operate. A 24V DC
power supply can be either a rack mounted or remote mounted device. Wago
PLC systems require a remote mounted supply.
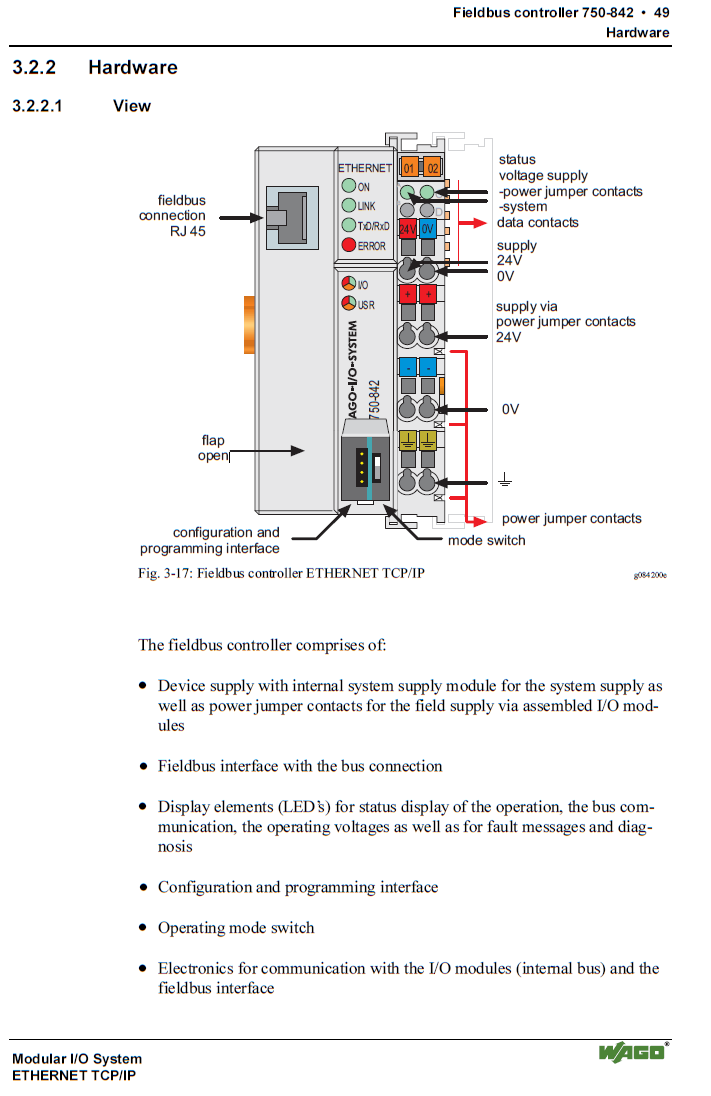
- Figure
1-1 below is an example of a typical Wago PLC arrangement.

Figure 1-1
Basic Theory of Operation
We first
must understand the various memory areas involved. There is “Input Image”,
“Output Image” and “Internal Memory” areas. Some manufacturers may subdivide
the internal memory into more than one area. For the Wago platform, the
following designations apply:
%I- Input Image
%M- Internal or “Flag” memory
%Q- Output Image
It is also
important to understand the various “Data Types” commonly used. A “Data Type”
simply means the type of information that will be stored and how much memory
space will be required to store it. For the Wago platform, the following
designations apply:
BOOL- A single bit value ranging from 0 to
1.
BYTE- An 8 bit value ranging
from 0 to 255
WORD- A 16 bit unsigned value ranging 0 to
65535.
INT- A 16 bit signed value consisting
of a 15 bit value plus a sign bit ranging from -32767 to +32767.
DWORD- A 32 bit value consisting of two 16 bit
registers ranging from 0 to 4294967295.
DINT- A 32 bit value consisting of two 16
bit registers containing a 31 bit value plus a sign bit ranging from
-2147483648 to 2147483648.
REAL- Also know as a “Floating Point”
number. A 32 bit value (double word) containing a value and an exponent ranging
from 1.175494351e-38 to 1.175494351e+38
How memory is accessed needs to be
understood as well. Basically, memory can be accessed as 1 (bit), 8 (byte), 16
(word or integer) or 32 (double word or real) bits at a time. The following are
typical memory addressing examples for the Wago platform:
Examples:
%MW100 %IX10.4
%M- Internal Memory Area %I- Input Image Area
W- Word (16 bits) X-
Boolean (1 bit)
100- Register Word Address 10- Register Word
Address
.4-
Bit Location of the Word Address
We can assign names to portions of
data in memory. These are referred to as “variable names” or simply
“variables”. Each variable name must be unique. There are basically two types
of variables, “Local” and “Global”. Local variables are created and generally used
only within the POU that they are created and defined in. Global variables are
created in a separate variable table and can be used throughout the program.
The following is an example of how a variable is defined;
Example:
MyVariable AT %MW100 : WORD;
MyVariable- Name of the variable
%MW100- Memory Location
WORD- A 16 bit unsigned value
ranging 0 to 65535.
The last important part to
understand about memory is how the I/O is addressed. First, the word addresses
are counted and then bit addresses. This is true for both inputs and outputs. Below
is an example of how the inputs are addresses by the bus coupler:
Figure 1-2
There are several operations
carried out within the processor other than simply the executing of the
computations as defined by the user program. These operations are carried out
in an “order of execution” or predefined steps set forth by the firmware.
Understanding the order of execution is important when writing a program
because certain events precede others.
In a Wago
processor, the first operation is to read any forces that exist into the memory
area(s) chosen. Next, the physical input
statuses, both bit and analog, are loaded, or read into, the Input Image table.
The program is executed and any results are loaded into the internal memory and
the Output Image. The last step is to move, or output, the Output Image to the
physical outputs. Notice that the forces are read first and then the Input
Image is read and then the code is executed, this is why sometimes it seems
that some forces have no effect in various parts of the program.
A program
is divided into individual tasks or collections of similar tasks and stored in
individual POU’s or Program Organizational Units. Once a POU is created and the
program instructions are entered into the POU, a “call” or a command to execute
the POU’s instructions must be entered into the main cyclical POU called
PLC_PRG. The PLC_PRG is the only POU that will automatically execute and every
program must have a POU named PLC_PRG.
CoDeSys programming software.
CoDeSys is
the programming software used for the Wago platform. The software supports
several programming languages. The two most commonly used languages used within
M&I’s software packages are Ladder Logic and Structured Text.
Ladder Logic is the most commonly
used across many other manufactures as well since it very closely mimics relay
logic that many people can easily understand. The main limitation with Ladder
Logic is that mathematical processes become visually complex on the screen of
the programming device.
Structured Text somewhat mimics the
Basic programming language. It supports complex math easily however bit logic
becomes difficult to read and understand to many users.
Although
components and software may look very different from one manufacturer to the
next, all share a great deal in common. All PLC systems will consist of the
same basic components, a processor, I/O modules and some sort of programming
software. All PLC processors will execute the operations in generally the same
manner as described above.
II. Creating
a program
Defining project requirements.
Every
project requires a good amount of planning in order to divide complex
operations into smaller, more manageable tasks. Attention to the order of
execution is also very important. Any operation can be divided into a series of
much simpler steps stored in the processor in individual sections or POU’s
(Program Organizational Units) and then executed in a user defined order.
In our
example project, we will have a 750-841 Bus Coupler (the processor with an
Ethernet port), one 4 point discrete input module, one 2 point discrete output
module, one 2 channel analog input module, one 2 channel analog output module
and one end module.
Our first
example project will be simply toggling an output bit on and off at a one
second interval, 500ms on and 500ms off. Don’t worry; it will get much more
complicated later on.
Create a new file
Open the
CoDeSys software on you PC or Laptop. Go to “File> New”. You will see a
popup window prompting you to enter the type of bus coupler that will be used.
Select WAGO_750-841 and then “OK”.
Figure 2-1
Each
individual POU can be created to use a language that will best suite the task or
tasks that the POU will execute, the preferred language must be selected. In
our example project, select ST (Structured Text) for the PLC_PRG and then click
“OK”. See figure 2-2 below.
Figure 2-2
We will
need to save and name the project. Go to “File> Save As” and save the
project on your local drive with the name “First Project”.
Example:
C:\First Project
Create a new POU
We could enter our instructions
into the PLC_PRG but in order to maintain a structure to the program, we will
create a new POU to accomplish this. Click on the POU tab at the bottom of the
screen. Move your cursor over the and right click, a popup will appear. Select
“Add Object”. Again, a popup will appear and we will type in the name “Blink”
as the name of our POU, select “LD” (Ladder Diagram) as the language and click
“OK”.
Figure 2-3
You will
notice now that a new window has been opened on the screen with “Blink (PRG-LD)
in the upper left corner of the window. This is where we will enter the code
and create the variables. Also notice that the window is divided into two
areas, the upper area is where the variables will be created and the lower area
is where the ladder “rungs” will be entered. See Figure 2-4 below.
Figure 2-4
At this
point, there are a number of items on the screen that need to be noted.

Figure 2-5
We must
define or “declare” our I/O variables. Click on the “Recourses” tab on the
bottom of the screen and then right click on “Global Variables” and then “Add
Object”.
Figure 2-6
In the pop-up window, name the new
Global Variable List “IO_Variables” as shown below.
Figure 2-7
Declare
the first digital output in the stack as Output1 as shown below.
Example:
Output1 AT %QX2.0 : BOOL;
Output1 - Name of the
variable
%QX2.0 - Memory Location
BOOL - A single bit.
Figure 2-8
Now we will begin to enter our
code to create a program that will cause an output of our PLC to blink as
mentioned earlier. Click on the “POUs” tab at the bottom of the screen and then
on the “Blink” POU created earlier. On the fist rung, enter a normally closed
contact, an on-delay timer (TON) and an output coil as shown below.
Figure 2-9
Then, copy and past the rung to Rung 2 and change the
contact at the first of the rung to a Normally Open contact.
Now we can assign the tagnames that will be used in the
“Blink” POU. We will name our On Delay Timer (TON) BlinkTmr and the output of
the rung Blink. We well declare these as “Local Variable” or within the top
window of our POU. Below the VAR heading in the top window, type the following:
BlinkOffTmr : TON;
BlinkOnTmr : TON;
BlinkOff : BOOL;
BlinkOn : BOOL;
BlinkOffDuration : TIME :=T#500ms;
BlinkOnDuration : TIME :=T#500ms;
Now assign the tagnames to the objects in the ladder rung.
When complete, the declarstions and ladder should appear as sown below in
figure 2-10.
Figure 2-10
Next, we need to tie the BlinkOn tagname to the physical
output. Insert another rung like Figure 2-11 connecting BlinkOff to Output1.
Figure 2-11
Finally, we need to add the name of the new POU into the
main cyclical POU or PLC_PRG. Under the POUs tab, open the PLC_PRG. In the
first line type:
Blink;
Figure 2-12
Now save the project, download and test!
Link DownLoad Wago PLC Documents:
---BlogKentQ---